A very important aspect of this project is the ability to predict with accuracy the intention of motion of a patient. This prediction allows the controller to plan ahead the trajectory of the robot and apply the desired force profile. How can we know though in advance what is a person planning to do?
When thought of the problem initially, this seems like an impossible task. However, there are certain conditions in the rehabilitation scheme that help us perform this impossible task.
First of all, in a rehabilitation task, we usually encounter repetitive motions with relatively slow speeds of execution. We can use this to our advantage, since prediction of a repetitive/periodic signal is much easier than a random looking one. For visualisation purposes, you can see an example of captured kinematics from a trial of 4 repetitions below.
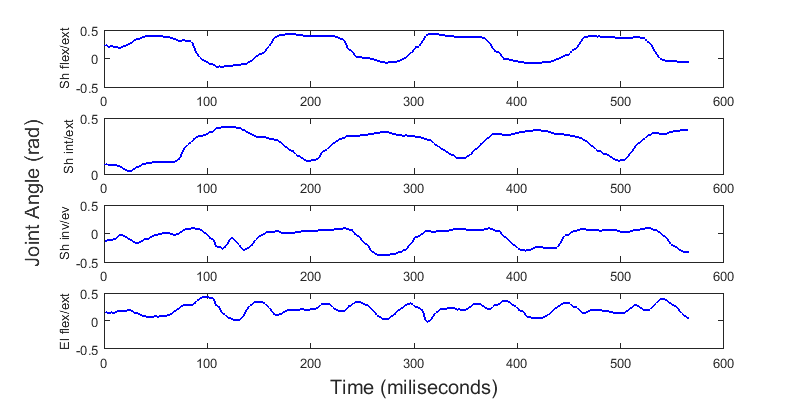
Joint angles over time during a rehabilitation task
Secondly, we can extract information about intention, before the motion actually happens, using Electromyography (EMG). This is possible since the activation of a muscle is taking place a few miliseconds before the actual contraction of the muscle (which is what causes the motion). This is especially useful in some pathologies, in which a patient has muscle activation, but due to muscle malfunction, there is no or little muscle contraction.
Combining these two conditions, we decided to make an experiment and see how well can we predict the intention of motion. The experiment was simple: Ask participants to perform three types of motion while we were measuring EMG and kinematics. We measured with 8 volunteers (5 male, 3 female) and for each type of motion we had three trials of ten repetitions each. This gave us enough data to see if we could build a model for the prediction.
Since the signals appear somehow periodic, we decided to do prediction based on auto-regressive models, more specifically non-linear ones. To tune the parameters, we used machine learning principles, and the auto-regressive models were implemented as neural networks. Two of the three trials for each person were used for training, while the third trial was used for validation. Using the standard neural network toolbox of MATLAB we constructed and trained neural networks for each volunteer and type of motion. Two trials of ten repetitions were sufficient to train the models so that a prediction with a horizon of one second were decent. You can see a sample of the prediction in the figure below.

Joint angle prediction over time. Prediction is happening every one second, for the second ahead
This result is very useful for this project: It demonstrates that prediction of the intention of motion is indeed possible, with a good accuracy. This prediction is possible with just a few repetitions of the motion performed by a volunteer, which makes it suitable for application during this project. The following step is now to integrate this prediction in the current ROS implementation, so that prediction is happening real-time. This is necessary so that we provide the predicted trajectories to the robotic planner.
This work has been presented at RAAI 2019.
