Autonomous Guidance of a quadcopter based on vanishing point detection.
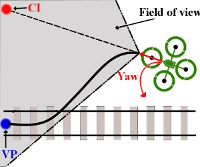
Unmanned aerial vehicles are increasingly being used and showing their advantages in many domains. However, their application to railway systems is very little studied. In this paper, we focus on controlling an AR.Drone UAV in order to follow the railway track. The method developed relies on vision-based detection and tracking of the vanishing point of the railway tracks, overhead lines, and other related lines in the image, coupled with a controller that adjusts the yaw so as to keep the vanishing point in the center of the image. Simulation results illustrate that the method is effective, and are complemented by vanishing-point tracking results on real images.
The movies below illustrate the algorithm in a simulated railway environment, and in a previous real-life application in corridor following.