Robot control using data from depth camera
In several applications, robots are used in dangerous, sterile or remote locations. However, the current level of sophistication of robotic controllers, does not allow them to operate without human supervision or intervention. Therefore, these robots need to be controlled by a human, usually from a distance.
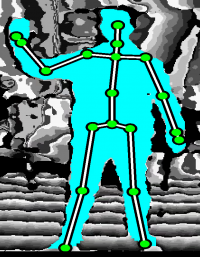
To reduce the posibility of errors during the control, and to increase the dexterity of the robot, we need intuitive methods for controlling the robot. This project is about designing a controller that translates the motion captured from a depth camera (Astra Pro, Orbbec) into actions of a robot.
The student should have skills (or be interested to develop them) in the following areas:
- Robotics
- Basic C++
- Linux, ROS
People:
Start date (duration):
October, 2018